



عملکرد واقعی دست روباتها با عضلات زنده آزمایشگاهی
وقتی صحبت از ساخت روباتها میشود، چرا از هیچ شروع کنیم وقتی طبیعت، مواد و قطعات بهتری از قطعات مصنوعی را برای ما طراحی کرده است؟ محققان دانشگاه توکیو در حالحاضر راه جدیدی برای تلفیق بافت ماهیچههای زنده بر روی یک اسکلت روباتیک ایجاد کردهاند که باعث میشود روباتها به شیوه واقعی حرکت کنند و اعضای بدنشان را حرکت دهند. این اولینبار نیست که دانشمندان روباتها و سلولهای زنده را ترکیب کردهاند. در سال ۲۰۱۶، محققان از سلولهای قلب موش متصل به یک اسکلت طلایی برای ایجاد یک زیستروبات استفاده کردند که میتوانست با نور کنترل شود. مدت کوتاهی پس از آن، یک تیم دیگر یک روبات خزنده را از عضلات حلزون دریایی ساختند. محققان دانشگاه توکیو برای این روبات جدید، ماهیچهها را بر روی اسکلت روبات رشد دادند و این عضلات روی تمام این اسکلت رشد کردند و با رشد خود، بافتها را تشکیل دادند. برای تحریک عضلات از الکترود استفاده شد که به روبات اجازه حرکت اندامش را میداد، مثلا روبات توانست انگشت خود را از مفصل خم کند.
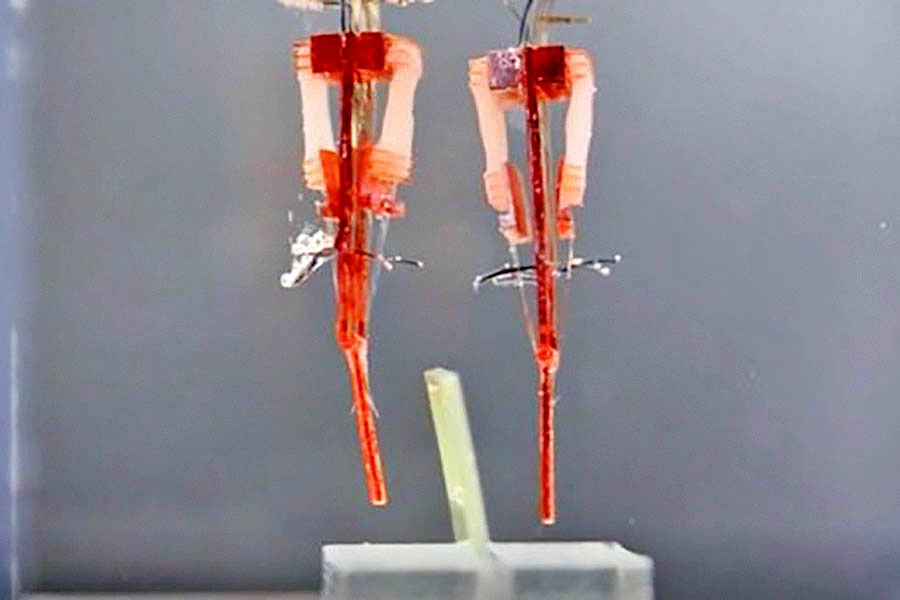
در مطالعات قبلی، عضلات مصنوعی مدت زیادی دوام نمیآوردند و از بین میرفتند، اما محققان دانشگاه توکیو این معضل را با استفاده از بافتهای طبیعی دور زدند؛ جایی که دو عضله برای رسیدن به یک هدف با یکدیگر همکاری میکنند. برای آزمایش این طراحی، محققان نوعی از انگشت روباتیک را ساختند که میتواند در هنگام فعال شدن از لحاظ الکتریکی، تا ۹۰ درجه خم شود. یکی از این روباتها به تنهایی قادر به برداشتن و حرکت دادن یک حلقه بود، درحالیکه دو تا از این انگشتها میتوانند یک قاب مربعی را بلند کنند. «یویا موریموتو»، یکی از محققان این مطالعه میگوید: یافتههای ما نشان میدهد که با استفاده از این سازههای عضلات، روباتها میتوانند حرکات انگشت انسان را تقلید کنند. اگر ما بتوانیم این عضلات را به یک دستگاه واحد متصل کنیم، باید بتوانیم درگیریهای عضلانی پیچیدهتری را ایجاد کنیم که عملکرد دستها، بازوها و سایر قسمتهای بدن را ممکن کنند.











ارسال نظر